pytorch分布式训练
简介
整体思路
DDP系列第一篇:入门教程多机多卡
- 分布式训练的几个选择:
- 模型并行 vs 数据并行
- PS 模型 vs Ring-Allreduce 。 Allreduce operation can not start until all processes join, it is considered to be a synchronized communication, as opposed to the P2P communication used in parameter servers.
- 假设 有两台机子,每台8张显卡,那就是2x8=16个进程,并行数是16。DDP 推荐每个进程一张卡,在16张显卡,16的并行数下,DDP会同时启动16个进程。rank表示当前进程的序号(0~16),用于进程间通讯。local_rank 表示每台机子上的进程的序号(0~7),也用来指定机器上的gpu 序号。用起来 就是一行代码,
model = DDP(model, device_ids=[local_rank], output_device=local_rank),后续的模型关于前向传播、后向传播的用法,和单机单卡完全一致。DDP系列第二篇:实现原理与源代码解析 - 每个进程跑的是同一份代码,进程从外界(比如环境变量)获取 rank/master_addr/master_port 等参数,rank = 0 的进程为 master 进程
[源码解析] PyTorch 分布式(8) ——– DistributedDataParallel 之 论文篇应用程序开发通常从本地模型开始,然后在必要时扩展。所以需要有一个从本地模型开始,修改代码以适应分布式的过程。为了避免这个从本地模型到分布式模型的过渡期间太过麻烦,API在应用程序代码中是非侵入性的。
用torchrun实现分布式开发
先不说模型训练,单说分布式开发,来一个Hello World
import torch
import os
if __name__ == '__main__':
rank = int(os.getenv('RANK','0'))
world_size = int(os.getenv('WORLD_SIZE','1'))
torch.distributed.init_process_group(rank=rank, world_size=world_size, backend='nccl')
print(f'Hello World from rank:{torch.distributed.get_rank()} out of {torch.distributed.get_world_size()} worlds.')
可以用torchrun --nproc-per-node 2 hello.py来启动。
- –nproc-per-node表示每台服务器上启动多少个进程
- –master_addr和–master_port:当启动的是多机环境时,需要用这两个参数指定主机的IP地址和端口号。这两个参数在所有master和slaver机器上都是一样的,不需要修改。
- –nnodes: 当多机启动分布式时,使用这个参数,表明总共有多少台机器。master会根据这个参数配置来等待slaver链接,直到slaver数量凑够nnodes才会启动。这个参数在每台机器上都是一样的,不需要修改。
- –node_rank:表示当前node是全部node中的第几个,这个参数需要根据启动的机器进行更改,master的rank必须是0。 上述启动参数要放在torchrun之后,脚本路径之前。写在脚本路径之前的参数不会被传递给脚本运行的环境,所以脚本中不要处理这些参数。
原生多进程
使用torchrun启动脚本,就是以多进程方式启动脚本。首先来看看python原生的多进程启动方式:
import multiprocessing as mp
def main(rank, world):
print(rank, world)
if __name__ == '__main__':
world_size = 4
ps = [mp.Process(None, main, args=(rank, world_size)) for rank in range(world_size)]
for p in ps:
p.start()
for p in ps:
p.join()
这种多进程能不能拿来作为torch的分布式训练环境呢?当然是可以的,只需要这样操作:
import multiprocessing as mp
import torch
import torch.distributed
def main(rank, world_size, master_addr='127.0.0.1', master_port=29500):
init_method = f'tcp://{master_addr}:{master_port}'
torch.distributed.init_process_group(rank=rank,world_size=world_size,init_method=init_method,backend='nccl')
print(f'rank:{torch.distributed.get_rank()} world_size:{torch.distributed.get_world_size()}')
if __name__ == '__main__':
world_size = 4
ps = [mp.Process(None, main, args=(rank, world_size)) for rank in range(world_size)]
for p in ps:
p.start()
for p in ps:
p.join()
这里init_method就是用来在初始化阶段,实现进程发现的方法,除了tcp,还可以用本地文件发现或者环境变量。除了multiprocessing 的多进程,用subprocess 的多进程也是一样可以的。当然torch也提供了一种启动多进程的方法:
import torch
def main(rank, world_size, master_addr='127.0.0.1', master_port=29500):
init_method = f'tcp://{master_addr}:{master_port}'
torch.distributed.init_process_group(rank=rank,world_size=world_size,init_method=init_method,backend='nccl')
print(f'rank:{torch.distributed.get_rank()} world_size:{torch.distributed.get_world_size()}')
if __name__ == '__main__':
world_size = 4
torch.multiprocessing.spawn(main, args=(world_size,), nprocs=world_size)
初始化分布式环境
在启动的训练脚本中,需要先初始化分布式环境,也就是下面这几行:
rank = int(os.getenv('RANK','0'))
world_size = int(os.getenv('WORLD_SIZE','1'))
torch.distributed.init_process_group(rank=rank, world_size=world_size, backend='nccl')
如果是使用torchrun启动的脚本,torch会帮你在环境变量中写入RANK和WORLD_SIZE这两个变量,在脚本中可以读出来。它们分别表示当前进程的序号和总进程数。这个进程序号是全局的进程序号,也就是说如果每台服务器启动8个进程,总共10台服务器参与训练,那么第十台机器的8个进程rank分别是72、73、74、75、76、77、78、79。world_size也是全局的进程数,而不是单台服务器上的进程数。获得rank和world_size后,就可以用torch.distributed.init_process_group初始化分布式环境。需要提的一点是,torch并没有local_rank 这个概念。这是一些训练框架自己定义的,通常用来表示当前进程是这台服务器上的第几个进程。
在初始化命令中,我们还指定了backend参数,这个参数表示的是分布式环境默认使用的通信后端是什么,一般可以选择 nccl、gloo和mpi后端。gpu to gpu的通信选择nccl后端。cpu to cpu的通信选择gloo后端,一般不太会用到mpi后端。nccl通信会比gloo通信快,所以应该尽量使用nccl进行通信。但是在有些时候,比如读取数据的阶段,如果多个进程之间需要通信,一般使用用gloo通信。因为这时,我们并不希望这些还没有开始正向传播的张量过早出现在gpu上,避免过多占用显存。
set device
分布式训练中,在我们创建gpu张量时,经常使用torch.cuda.current_device()获取当前rank使用的cuda设备,然后直接在这个设备上创建。 但是使用这个函数的前提是之前通过set_device显示的设定过默认设备。
所以一个好习惯是,在执行主要的训练逻辑之前,尽早设置默认的cuda设备:
devices = torch.cuda.device_count()
torch.cuda.set_device(rank % devices)
如果不手动设置,current_device默认会返回cuda:0。
通信算子
通信算子指的是在分布式训练中,能够在不同rank之间进行数据交换的算子。torch提供了很多通信相关的算子,最常用可以划分为5类:规约、聚集、广播、点对点通信和其他。
规约。规约最典型的就是torch.distributed.all_reduce,这个算子能够对不同rank之间的数据进行求和、求均值、最大值等操作,特点是不论有多少个rank,最终结果只有一个tensor。例如下面这段代码,作用是对所有rank之间的”tensor”求和:
import torch
import os
if __name__ == '__main__':
rank = int(os.getenv('RANK','0'))
world_size = int(os.getenv('WORLD_SIZE','1'))
torch.distributed.init_process_group(rank=rank, world_size=world_size, backend='nccl')
devices = torch.cuda.device_count()
torch.cuda.set_device(rank % devices)
# rank0的tensor=1,rank1的tensor=2
tensor = torch.tensor([rank + 1], dtype=torch.long, device='cuda')
torch.distributed.all_reduce(tensor) # 求和结果为3
print(f'rank:{rank} {tensor}')
规约操作基本可以算是最常用的通信算子。例如rank之间通过规约操作同步梯度、计算平均loss,再比如分布式softmax利用规约计算最大值、归一化分母等等。
聚集操作中最典型的是torch.distributed.all_gather(),能够把不同rank的数据收集到一起,特点是参与通信的rank有多少,就会得到多少个tensor。例如下面这段代码,作用是将所有rank的tensor收集到一起:
import torch
import os
if __name__ == '__main__':
rank = int(os.getenv('RANK','0'))
world_size = int(os.getenv('WORLD_SIZE','1'))
torch.distributed.init_process_group(rank=rank, world_size=world_size, backend='nccl')
devices = torch.cuda.device_count()
torch.cuda.set_device(rank % devices)
tensor = torch.tensor([rank+1], dtype=torch.long, device='cuda')
tensors = [torch.empty_like(tensor) for _ in range(world_size)]
torch.distributed.all_gather(tensors,tensor)
print(f'rank:{rank} {tensors}')
all_gather可以模拟all_reduce,比如sum(tensors)就等于all_reduce sum,max(tensors) 就是all_reduce max。聚集相比规约更加灵活,但是规约的效率和显存占用通常会更好。
广播的典型操作是 torch.distributed.broadcast(),作用是将指定rank的tensor发送给其他所有rank,比如下面这段代码,是将rank0的tensor发送给其他所有rank,这样最终所有rank的tensor都是一样的
import torch
import os
if __name__ == '__main__':
rank = int(os.getenv('RANK','0'))
world_size = int(os.getenv('WORLD_SIZE','1'))
torch.distributed.init_process_group(rank=rank, world_size=world_size, backend='nccl')
devices = torch.cuda.device_count()
torch.cuda.set_device(rank % devices)
tensor = torch.tensor([rank+1], dtype=torch.long, device='cuda')
torch.distributed.broadcast(tensor,0)
print(f'rank:{rank} {tensor}')
广播的特点是数据由一个节点到所有节点,通常用于将只会出现在某一个rank的信号发送到全部rank。
除了上述几个所有rank之间的通信,有时我们也需要两个rank之间的两两通信,这时就会用到p2p通信。p2p通信的发送方使用torch.distributed.send(),接收方使用torch.distributed.recv()。比如下面这段代码,功能是所有偶数rank将tensor发送到下一个奇数rank:
import torch
import os
if __name__ == '__main__':
rank = int(os.getenv('RANK','0'))
world_size = int(os.getenv('WORLD_SIZE','1'))
torch.distributed.init_process_group(rank=rank, world_size=world_size, backend='nccl')
devices = torch.cuda.device_count()
torch.cuda.set_device(rank % devices)
if rank % 2 == 0:
tensor = torch.tensor([999], dtype=torch.long, device='cuda')
torch.distributed.send(tensor, rank+1)
else:
tensor = torch.empty(1, dtype=torch.long, device='cuda')
torch.distributed.recv(tensor,rank-1)
print(f'rank:{rank} {tensor}')
上面大多数算子都是原地操作,这就带来一个问题,原地操作要求先创建一个空张量,等待通信算子把数据放进来。但是一个rank怎么知道被通信过来的张量shape是什么样的,怎么提前创建这个空张量?尤其是在广播和p2p通信时经常会碰到这个问题。一个常用的方案是在通信以前,先通信一个固定ndim的张量用来表示接下来要通信的张量的shape,然后再通信真正的数据。这种方法有点像定义一种通信协议,第一次握手通信shape,第二次通信数据。点对点通信主要的应用场景一个是pipeline并行,由上一个pipe发送数据到下一个pipe,一个是蒸馏的teacher 模型发送 probabilities 给 student,以及类似的reference-policy model。
还有一个经常使用的是同步屏障 torch.distributed.barrier(),这个操作不通信任何数据,作用是确保所有进程都运行到此处后再开始之后的动作。比如当存储checkpoint时,我们通常只会让第一个数据并行的rank进行保存,其他rank此时就应该使用同步屏障等待第一个rank保存结束。这样可以避免其他rank提前开始新的计算或提前结束导致保存失败,例如:
import torch
import os
import time
if __name__ == '__main__':
rank = int(os.getenv('RANK','0'))
world_size = int(os.getenv('WORLD_SIZE','1'))
torch.distributed.init_process_group(rank=rank, world_size=world_size, backend='nccl')
devices = torch.cuda.device_count()
torch.cuda.set_device(rank % devices)
if rank == 0:
time.sleep(20) # 用sleep20秒模拟rank0在做一些高耗时行为,比如存储checkpoint
else:
a = 1 + 2
torch.distributed.barrier()
除了上面这几种,还有all-to-all算子和scatter算子。在LLM场景中经这两个算子经常出现在序列并行的正、反向传播中。在使用通信算子时,需要确保所有相关rank都要执行到这一段代码,不然已经执行到这一步的rank会hang住一直等待,导致程序无法继续。
通信组
上面的提到的算子,除了p2p通信,基本都是所有rank参与的通信,如果只能这样未免有些太死板了。想要前5个rank all_reduce,后5个 rank all_gather应该怎么做?广播只广播给奇数rank怎么做?一部分操作在gpu上用nccl通信,一部分在cpu上用gloo通信怎么实现?如果2个rank同时用p2p通信不同张量,怎么做区分?这里就轮到通信组登场了。
通信组是通过下面这种形式创建的:
ranks = [0,1]
group = torch.distributed.new_group(ranks,backend='nccl')
上面这段代码的意思是创建1个通信组,包含 rank0和rank1,以nccl作为后端。 在使用通信算子时,我们可以通过group参数指定通信组,这样数据交换就只会发生在组内。比如当你这样使用barrier时,可以指定通信组,这样只要组内的rank都到达barrier,就可以继续,而不是等待所有rank都到达barrier才能继续:
import torch
import os
if __name__ == '__main__':
rank = int(os.getenv('RANK','0'))
world_size = int(os.getenv('WORLD_SIZE','1'))
torch.distributed.init_process_group(rank=rank, world_size=world_size, backend='nccl')
devices = torch.cuda.device_count()
torch.cuda.set_device(rank % devices)
ranks = [0,1]
group = torch.distributed.new_group(ranks)
if rank in ranks:
torch.distributed.barrier(group=group)
print(f'rank:{rank} finish')
else:
torch.distributed.barrier()
print(f'rank:{rank} finish')
通信组可以创建多个,并且每个可以指定使用不同的后端,方便进行cuda或cpu张量的混合通信:
group1 = torch.distributed.new_group([0,1])
group2 = torch.distributed.new_group([2,3])
group3 = torch.distributed.new_group([1,2,3])
group4 = torch.distributed.new_group([0,3], backend='gloo')
在使用通信组时,rank自身必须是这个通信组的成员,比如rank3不能使用group1。那么既然rank3不能使用group1,那rank3能不能干脆就不创建group1,只创建group2、3、4呢?答案是不行。torch对创建通信组有两个要求:
- 通信组中涉及到的所有rank必须全都执行创建通信组的代码
- 通信组在所有rank上的创建顺序必须是一样的
比如在rank0创建的第一个通信组是[0, 1],那么rank1创建的第一个也必须这个,rank2、3也一样,即使他们不能用这个通信组。所以多通信组的创建代码一般是长这样的:
group = None
rank = torch.distributed.get_rank()
for ranks in [[0,1],[2,3]]:
_group = torch.distributed.new_group(ranks)
if rank in ranks:
group = _group
这样保证group的创建顺序是一致的,并且只保留自己这个rank能用的组。
PS:分布式程序(再具体就是多进程程序)从代码看,大部分逻辑相同,但是rank不同,个别步骤基于rank 做一些本rank的操作,此外还有一些多个步骤间同步数据、步调的工作。gpu cuda编程也非常类似,可以通过参数和全局函数知道自己处于第几个block(threadIdx)和thread(blockIdx)。且一般都是预先建好 参数和结果变量(申请好内存空间),等着跟其他worker发送和接收它们。
单机单卡
单机单卡训练步骤:定义网络,定义dataloader,定义loss和optimizer,开训
BATCH_SIZE = 256
EPOCHS = 5
if __name__ == "__main__":
# 1. define network
device = "cuda"
net = torchvision.models.resnet18(num_classes=10)
net = net.to(device=device)
# 2. define dataloader
trainset = torchvision.datasets.CIFAR10(...)
train_loader = torch.utils.data.DataLoader(
trainset,
batch_size=BATCH_SIZE,
shuffle=True,
num_workers=4,
pin_memory=True,
)
# 3. define loss and optimizer
criterion = nn.CrossEntropyLoss()
optimizer = torch.optim.SGD(
net.parameters(),
lr=0.01,
momentum=0.9,
weight_decay=0.0001,
nesterov=True,
)
print(" ======= Training ======= \n")
# 4. start to train
net.train()
for ep in range(1, EPOCHS + 1): # 控制在全部数据上训练的次数
for idx, (inputs, targets) in enumerate(train_loader):
inputs, targets = inputs.to(device), targets.to(device)
outputs = net(inputs)
loss = criterion(outputs, targets) # 获得输出结果和样本值的损失函数
optimizer.zero_grad()
loss.backward() # 根据loss 进行反向梯度传播
optimizer.step() # 用计算的梯度去做优化
单机多卡
如果是单机多卡,定义网络时加入 net = nn.DataParallel(net)
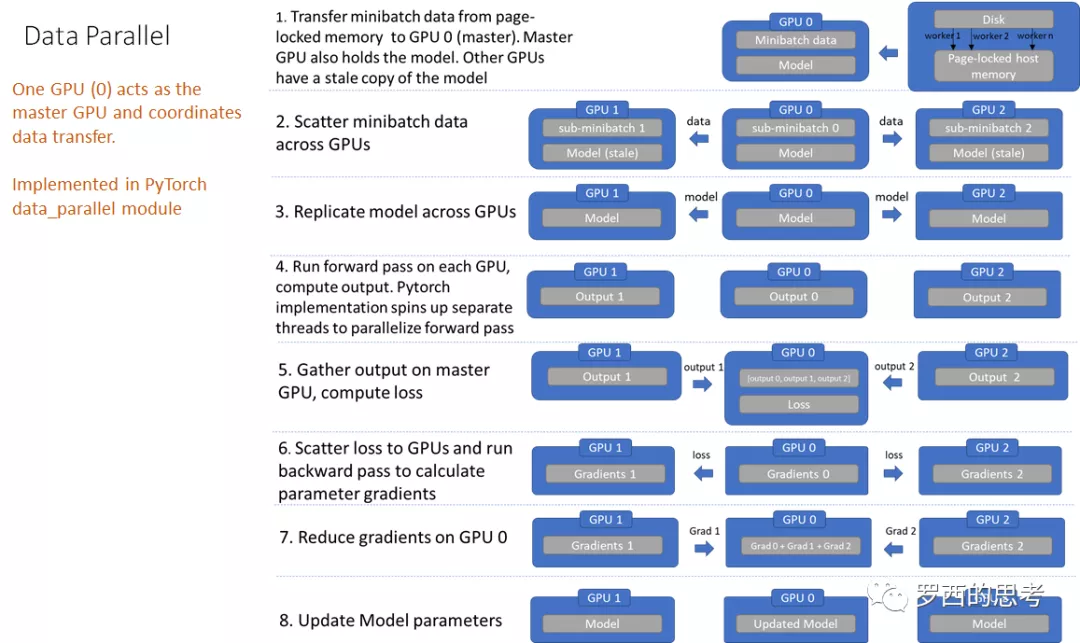
PyTorch 分布式(2) —– DataParallel(上) 缺点很多。
分布式训练
pytorch ddp论文:During distributed training, each pro- cess has its own local model replica and local optimizer. In terms of correctness, distributed data parallel training and local training must be mathematically equivalent. DDP guarantees the correctness by making sure that all model replicas start from the exact same model state, and see the same parameter gradients after every backward pass. Therefore, even though optimizers from different processes are all independent, they should be able to bring their local model replicas to the same state at the end of every iteration. PS:SPMD,所有设备执行相同的程序,只是处理不同的数据分片。最后将梯度进行全局的all-reduce然后返回给每张卡上更新模型。
PyTorch 分布式(5) —— DistributedDataParallel 总述&如何使用
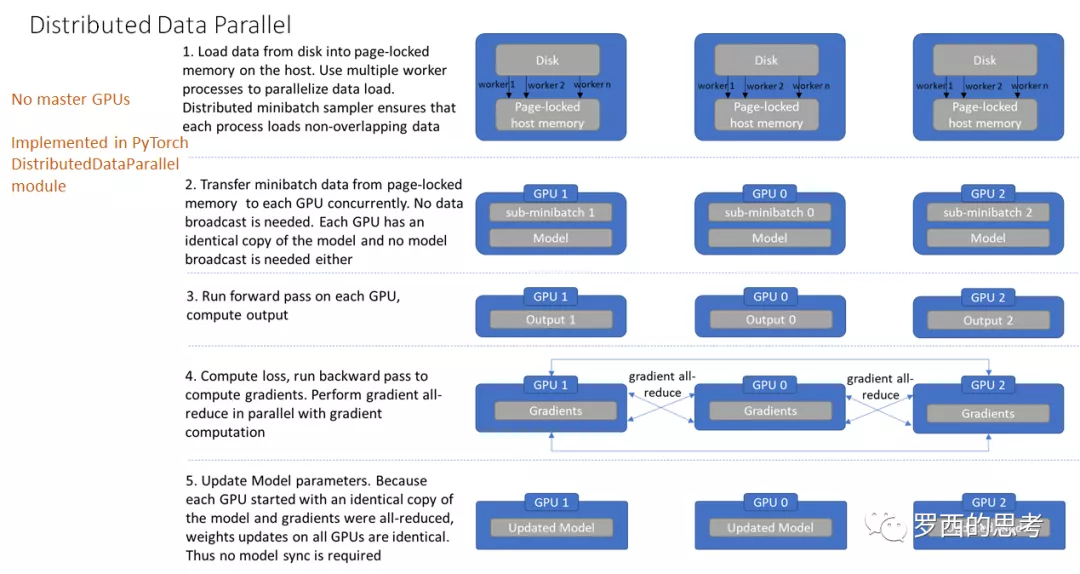
- 加载模型阶段。每个GPU都拥有模型的一个副本,所以不需要拷贝模型。rank为0的进程会将网络初始化参数broadcast到其它每个进程中,确保每个进程中的模型都拥有一样的初始化值。
- 加载数据阶段。DDP 不需要广播数据,而是使用多进程并行加载数据。在 host 之上,每个worker进程都会把自己负责的数据从硬盘加载到 page-locked memory。DistributedSampler 保证每个进程加载到的数据是彼此不重叠的。
- 前向传播阶段。在每个GPU之上运行前向传播,计算输出。每个GPU都执行同样的训练,所以不需要有主 GPU。
- 计算损失。在每个GPU之上计算损失。
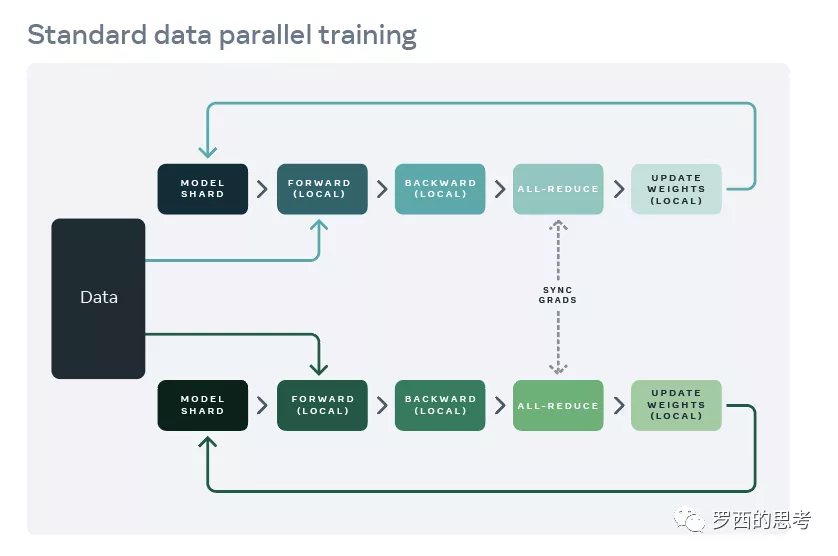
- 反向传播阶段。运行后向传播来计算梯度,在计算梯度同时也对梯度执行all-reduce操作。每一层的梯度不依赖于前一层,所以梯度的All-Reduce和后向过程同时计算,以进一步缓解网络瓶颈。在后向传播的最后,每个节点都得到了平均梯度,这样模型参数保持同步。关于AllReduce
- 更新模型参数阶段。因为每个GPU都从完全相同的模型开始训练,并且梯度被all-reduced,因此每个GPU在反向传播结束时最终得到平均梯度的相同副本,所有GPU上的权重更新都相同,也就不需要模型同步了
FullyShardedDataParallel
- Sharded :切分,比如zero1将优化器切分,可以翻译成 Optimizer State Sharded。
- FullyShard: 所有都切分,包括optimizer state, grad, param
- 所以FullyShardedDataParallel就是zero3。
模板代码
import torch.distributed as dist
import torch.utils.data.distributed
parser = argparse.ArgumentParser(description='PyTorch distributed training on cifar-10')
parser.add_argument('--rank', default=0,help='rank of current process')
parser.add_argument('--word_size', default=2,help="word size")
parser.add_argument('--init_method', default='tcp://127.0.0.1:23456',help="init-method")
args = parser.parse_args()
...
dist.init_process_group(backend='nccl', init_method=args.init_method, rank=args.rank, world_size=args.word_size)
...
trainset = torchvision.datasets.CIFAR10(root='./data', train=True, download=download, transform=transform)
## 数据并行需要进行数据切片
train_sampler = torch.utils.data.distributed.DistributedSampler(trainset,num_replicas=args.world_size,rank=rank)
trainloader = torch.utils.data.DataLoader(trainset, batch_size=batch_size, sampler=train_sampler)
...
net = Net()
net = Net().to(device) # device 代表到某个 gpu 或cpu 上
## 使用DistributedDataParallel 修饰模型
net = torch.nn.parallel.DistributedDataParallel(net)
- 用dist.init_process_group初始化分布式环境
- 一般来说,nccl 用于 GPU 分布式训练,gloo 用于 CPU 进行分布式训练。
- 这个调用是阻塞的,必须等待所有进程来同步,如果任何一个进程出错,就会失败。
- 数据侧,我们nn.utils.data.DistributedSampler来给各个进程切分数据,只需要在dataloader中使用这个sampler就好
- 使用 DDP 时,不再是从主 GPU 分发数据到其他 GPU 上,而是各 GPU 从自己的硬盘上读取属于自己的那份数据。
- 训练循环过程的每个epoch开始时调用train_sampler.set_epoch(epoch),(主要是为了保证每个epoch的划分是不同的)其它的训练代码都保持不变。
- 举个例子:假设10w 数据,10个实例。单机训练任务一般采用batch 梯度下降,比如batch=100。分布式后,10个实例每个训练1w,这个时候每个实例 batch 是100 还是 10 呢?是100,batch 的大小取决于 每个实例 GPU 显存能放下多少数据。
- 模型侧,我们只需要用DistributedDataParallel包装一下原来的model
pytorch 中的任何 net 都 是 torch.nn.Module 的子类,DistributedDataParallel 也是 torch.nn.Module 子类,任何 torch.nn.Module 子类 都可以覆盖 __init__ 和 forward方法 ,DistributedDataParallel 可以从 net 拿到模型数据(以及 在哪个gpu 卡上运行) ,也可以 从指定或默认的 process_group 获取信息。最后在__init__ 和 forward 中加入 同步梯度的逻辑,完美的将 同步梯度的逻辑 隐藏了起来。
实际例子
BATCH_SIZE = 256
EPOCHS = 5
if __name__ == "__main__":
# 0. set up distributed device
rank = int(os.environ["RANK"])
local_rank = int(os.environ["LOCAL_RANK"])
torch.cuda.set_device(rank % torch.cuda.device_count())
dist.init_process_group(backend="nccl")
device = torch.device("cuda", local_rank) # 把模型放置到特定的GPU上
print(f"[init] == local rank: {local_rank}, global rank: {rank} ==")
# 1. define network
net = torchvision.models.resnet18(pretrained=False, num_classes=10)
net = net.to(device)
# DistributedDataParallel
net = DDP(net, device_ids=[local_rank], output_device=local_rank)
# 2. define dataloader
trainset = torchvision.datasets.CIFAR10(...)
# DistributedSampler
# we test single Machine with 2 GPUs so the [batch size] for each process is 256 / 2 = 128
train_sampler = torch.utils.data.distributed.DistributedSampler(
trainset,
shuffle=True,
)
train_loader = torch.utils.data.DataLoader(
trainset,
batch_size=BATCH_SIZE,
num_workers=4,
pin_memory=True,
sampler=train_sampler,
)
# 3. define loss and optimizer
criterion = nn.CrossEntropyLoss()
optimizer = torch.optim.SGD(
net.parameters(),
lr=0.01 * 2,
momentum=0.9,
weight_decay=0.0001,
nesterov=True,
)
if rank == 0:
print(" ======= Training ======= \n")
# 4. start to train
net.train() # 标记为训练模式,推理时使用 net.eval()
for ep in range(1, EPOCHS + 1):
train_loss = correct = total = 0
# set sampler
train_loader.sampler.set_epoch(ep)
for idx, (inputs, targets) in enumerate(train_loader):
inputs, targets = inputs.to(device), targets.to(device)
outputs = net(inputs)
loss = criterion(outputs, targets)
optimizer.zero_grad() # 将梯度归零
loss.backward() # 反向传播计算得到每个参数的梯度值
optimizer.step() # 通过梯度下降执行一步参数更新,optimizer只负责通过梯度下降进行优化,而不负责产生梯度,梯度是tensor.backward()方法产生的。
train_loss += loss.item()
total += targets.size(0)
correct += torch.eq(outputs.argmax(dim=1), targets).sum().item()
# 输出loss 和 正确率
if rank == 0:
print("\n ======= Training Finished ======= \n")
每条命令表示一个进程。若已开启的进程未达到 word_size 的数量,则所有进程会一直等待
对训练的影响
假设10w 数据,单机训练任务一般采用batch 梯度下降,比如batch=100。分布式后10个实例,每个实例训练1w。
- 如果每个实例 batch 是100 ,根据pytorch 数据并行的原理,每个实例每次batch 训练后向传播会交换一次梯度,得到的梯度是每个实例上梯度的均值,也就是说你有10个实例,这个梯度均值就是1000个样本的梯度均值。学习率一般也要相应调整。
- 一般 每个实例的batch = 单机batch / world_size
DDP 总体实现
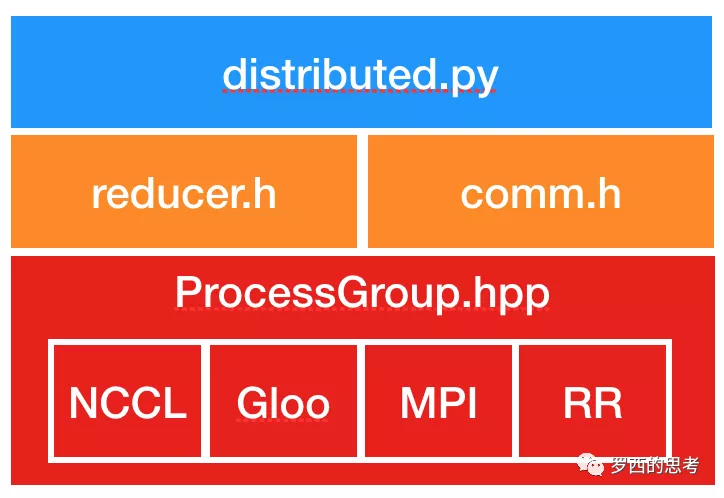
DDP implementation lives in both Python and C++ files, with Python exposing the API and composing non-performance-critical components, and C++ serving the core gradient reduction algorithm. The Python API calls into C++ core through Pybind11.
本地模型 Module 定义如下,经过 DDP 的封装,便成为一个有分布式能力的Module了。
class Module:
dump_patches: bool = False
_version: int = 1
training: bool # 本网络是否正在训练
_is_full_backward_hook: Optional[bool]
def __init__(self):
"""
Initializes internal Module state, shared by both nn.Module and ScriptModule.
"""
torch._C._log_api_usage_once("python.nn_module")
self.training = True
self._parameters = OrderedDict() # 在训练过程中会随着 BP 而更新的参数
self._buffers = OrderedDict() # 在训练过程中不会随着 BP 而更新的参数, running variance,running mean etc
self._non_persistent_buffers_set = set()
self._backward_hooks = OrderedDict()
self._is_full_backward_hook = None
self._forward_hooks = OrderedDict()
self._forward_pre_hooks = OrderedDict()
self._state_dict_hooks = OrderedDict()
self._load_state_dict_pre_hooks = OrderedDict()
self._modules = OrderedDict() # 本网络下属的子模块,采取迭代的方式进行定义
PyTorch 分布式(9) —– DistributedDataParallel 之初始化一次DistributedDataParallel迭代中的步骤如下
- Prerequisite:DDP 依赖 c10dProcessGroup进行通信。因此,应用程序必须ProcessGroup在构建 DDP 之前创建实例。
- Constuctor
- rank=0 进程会引用本地模块,把模型state_dict()参数广播到所有进程之中,这样可以保证所有进程使用同样初始化数值和模型副本进行训练。
- 每个 DDP 进程创建一个 local Reducer,为了提高通信效率,Reducer将参数梯度组织成桶,一次reduce一个桶。Reducer还在构造期间注册 autograd 钩子,每个参数一个钩子。当梯度准备好时,将在向后传递期间触发这些钩子。
- Forward Pass: [源码解析] PyTorch 分布式(12)—–DistributedDataParallel 之 前向传播
- 每个进程读去自己的训练数据,DistributedSampler确保每个进程读到的数据不同。
- DDP 获取输入并将其传递给本地模型。模型进行前向计算,结果设置为 out。模型网络输出不需要gather到 rank 0进程了,这与 DP不同。
- Backward Pass:
- backward()在 loss 上直接调用该函数 Tensor,这是 DDP 无法控制的,DDP 使用构造时注册的 autograd hooks 来触发梯度同步。当一个梯度准备好时,它在该梯度累加器上的相应 DDP 钩子将触发。
- 在 autograd_hook 之中进行all-reduce。假设参数index是param_index,则利用param_index获取到参数,标示为ready,如果某个桶里面梯度都ready,则该桶是ready。当一个桶中的梯度都准备好时,会 在该桶上Reducer启动异步allreduce以计算所有进程的梯度平均值。如果所有桶都ready,则等待所有 all-reduce 完成。当所有桶都准备好时,Reducer将阻塞等待所有allreduce操作完成。完成此操作后,将平均梯度写入param.grad所有参数的字段。所有进程的梯度都会reduce,更新之后,大家的模型权重都相同。所以在向后传播完成之后,跨不同DDP进程的对应的相同参数上的 grad 字段应该是相等的。
- 不需要像 DP 那样每次迭代之后还要广播参数。但是 Buffers 还是需要在每次迭代由 rank 0 进程广播到其他进程之上。
- Optimizer Step: 从优化器的角度来看,它正在优化本地模型。
单机场景下,pytorch 封装了torch.autograd包,torch.autograd is PyTorch’s automatic differentiation engine that powers neural network training.torch.autograd 封装了前向后向传播逻辑(实现自动微分),所谓分布式首先是 autograd engine的分布式。PyTorch 分布式 Autograd (1) —- 设计
- 分布式RPC框架
- 前向传播期间的 Autograd 记录
- 分布式 Autograd 上下文
- 分布式反向传播
- 分布式优化器
PyTorch 分布式 Autograd (2) —- RPC基础 是一个系列文章,有兴趣可以细读下, 比较有价值的点就是 有很多low leve api 代码示例,可以看下较为原汁原味的 分布式前后向传播过程。比如
# 代码目的是让两个 worker 之间就通过 RPC 进行协作。
def my_add(t1, t2):
return torch.add(t1, t2)
def worker0():
# On worker 0:
# Setup the autograd context. Computations that take
# part in the distributed backward pass must be within
# the distributed autograd context manager.
with dist_autograd.context() as context_id:
t1 = torch.rand((3, 3), requires_grad=True)
t2 = torch.rand((3, 3), requires_grad=True)
# 第一阶段:RPC操作,构建依赖基础
# Perform some computation remotely.
t3 = rpc.rpc_sync("worker1", my_add, args=(t1, t2))
# Perform some computation locally based on remote result.
t4 = torch.rand((3, 3), requires_grad=True)
t5 = torch.mul(t3, t4)
# Compute some loss.
loss = t5.sum()
# 第二阶段,执行后向传播
# Run the backward pass.
dist_autograd.backward(context_id, [loss])
# Retrieve the gradients from the context.
dist_autograd.get_gradients(context_id)
print(loss)
ProcessGroup
Collective communication包含多个sender和多个receiver,一般的通信原语包括 broadcast,gather,all-gather,scatter,reduce,all-reduce,reduce-scatter,all-to-all等。再对照 ProcessGroup python 定义,ProcessGroup可以看做对 Collective Communication Library 的封装。
多个process 组成一个process_group,比如每个group 持有一个tensor,想计算tensor的和,可以借助p2p先汇总到一个 process 上求和再广播(如果tensor很大呢?),但其实可以边communication边computation,来挖掘性能和节约带宽。
PyTorch 分布式(7) —– DistributedDataParallel 之进程组
如何让 worker 在建立ProcessGroup之前发现彼此?
- init_method,开始的前提:如何联系到其它机器上的进程。
- Shared file-system initialization:init_method=’file:///mnt/nfs/sharedfile’
- dist.init_process_group(backend, init_method=’tcp://10.1.1.20:23456’,ank=args.rank, world_size=4)
- dist.init_process_group(backend, init_method=’env://’,ank=args.rank, world_size=4) 这个进程会自动读取环境变量 MASTER_ADDR/MASTER_PORT/WORLD_SIZE/RANK
- store ,有TcpStore 和EtcdStore 可以发挥类似 etcd 用来发挥的作用:服务发现及分布式键值存储
store 和 init_method 是互斥的。store 先于 ProcessGroup 创建和初始化。PS: 随着版本的迭代,变动较大,不纠结了
init_process_group ==> ` rendezvous_iterator = rendezvous(init_method, rank, world_size, timeout=timeout)` 使用了rendezvous 机制,与elastic agent 共用 TcpStore(默认是共用的,也可以不共用), 此处的 rendezvous_handler 是一个函数(返回store/rank/world_size),与elastic agent 使用的 RendezvousHandler 不同。
# /pytorch/torch/distributed/rendezvous.py
def rendezvous(url: str, rank: int = -1, world_size: int = -1, **kwargs) -> (store, rank, world_size):
...
return _rendezvous_handlers[result.scheme](url, **kwargs)
# 如果 env TORCHELASTIC_USE_AGENT_STORE=true,则此处创建的 是 TCPStore client
def _create_c10d_store(hostname, port, rank, world_size, timeout) -> Store:
def _file_rendezvous_handler(url: str, **kwargs):
...
store = FileStore(path, world_size)
...
def _tcp_rendezvous_handler(url: str, timeout: timedelta = default_pg_timeout, **kwargs):
...
_create_c10d_store(hostname, port, rank, world_size, timeout) -> Store:
...
def _env_rendezvous_handler(url: str, timeout: timedelta = default_pg_timeout, **kwargs):
...
_create_c10d_store(hostname, port, rank, world_size, timeout) -> Store:
...
def register_rendezvous_handler(scheme, handler):
register_rendezvous_handler("tcp", _tcp_rendezvous_handler)
register_rendezvous_handler("env", _env_rendezvous_handler)
register_rendezvous_handler("file", _file_rendezvous_handler)
ProcessGroup 如何被使用
Collective functionsif the system we use for distributed training has 2 nodes, each of which has 8 GPUs. On each of the 16 GPUs, there is a tensor that we would like to all-reduce. The following code can serve as a reference:
# Code running on Node 0
import torch
import torch.distributed as dist
dist.init_process_group(backend="nccl",
init_method="file:///distributed_test",
world_size=2,
rank=0)
tensor_list = []
for dev_idx in range(torch.cuda.device_count()):
tensor_list.append(torch.FloatTensor([1]).cuda(dev_idx))
dist.all_reduce_multigpu(tensor_list)
# Code running on Node 1
import torch
import torch.distributed as dist
dist.init_process_group(backend="nccl",
init_method="file:///distributed_test",
world_size=2,
rank=1)
tensor_list = []
for dev_idx in range(torch.cuda.device_count()):
tensor_list.append(torch.FloatTensor([1]).cuda(dev_idx))
dist.all_reduce_multigpu(tensor_list)
After the call, all 16 tensors on the two nodes will have the all-reduced value of 16
抛开概念,从代码看其本质。processgroup 就是给每一个训练的 process 建立一个Communication thread。主线程(Computation thread)在前台进行训练,这个Communication thread 在后台做通信(比如交流梯度)。
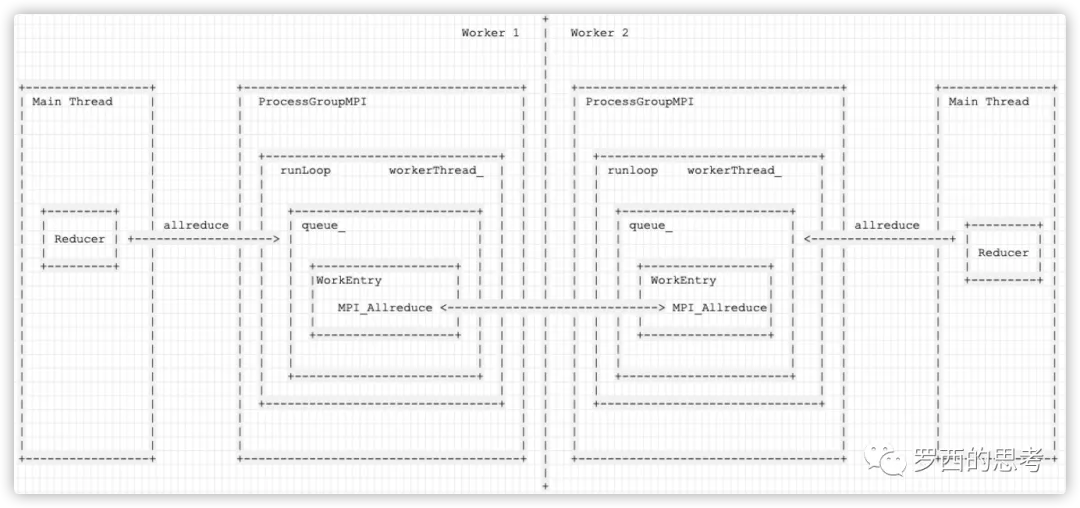
可以看下 ProcessGroup 的接口定义(从理论上,Ring AllReduce 分为Split/ScatterReudce/AllGather 三个步骤,不同框架命名会有差异)
# torch/_C/_distributed_c10d.py
class ProcessGroup(__pybind11_builtins.pybind11_object):
def allgather(self, *args, **kwargs):
def allgather_coalesced(self, output_lists, *args, **kwargs):
def allreduce(self, *args, **kwargs):
def allreduce_coalesced(self, tensors, *args, **kwargs):
def alltoall(self, *args, **kwargs):
def alltoall_base(self, *args, **kwargs):
def barrier(self, opts, *args, **kwargs):
def broadcast(self, *args, **kwargs):
def gather(self, *args, **kwargs):
def monitored_barrier(self, timeout=None, *args, **kwargs):
def rank(self):
def recv(self, arg0, *args, **kwargs):
def recv_anysource(self, arg0, *args, **kwargs):
def reduce(self, *args, **kwargs):
def reduce_scatter(self, *args, **kwargs):
def scatter(self, *args, **kwargs):
def send(self, arg0, *args, **kwargs):
def size(self):
def _allgather_base(self, output, *args, **kwargs):
def _get_sequence_number_for_group(self):
def _set_sequence_number_for_group(self):
ddp 初始化时 对模型参数进行广播 会调用到 process_group->broadcast(vec),反向传播 需要对梯度做 all-reduce 时候,Reducer会调用 process_group_->allreduce(tensors) 进行处理。
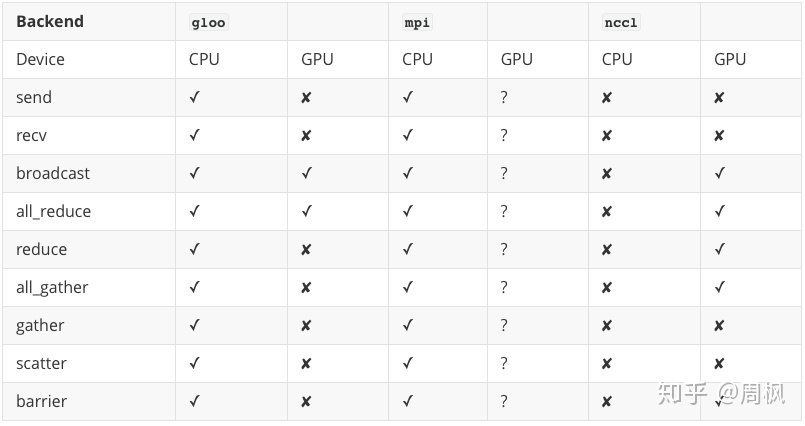
backend 是一个逻辑上的概念。本质上后端是一种IPC通信机制。对于用户来说,就是采用那种方式来进行集合通信,从代码上看,就是走什么流程(一系列流程),以及后端使用 ProcessGroupMPI 还是 ProcessGroupGloo …..。各主机之间需要进行通信。因此,需要指定通信的协议架构等。torch.distributed 对其进行了封装。提供了分布式通信原语
其它
DDP 在启动时 将 rank=0 的state_dict() 广播到其他worker,以保证所有worker的模型初始状态相同。需要广播的 state_dict 是什么?pytorch 的 state_dict 是一个字典对象,其将模型的每一层与它的对应参数建立映射关系,比如 model 每一层的weights及偏置等等。只有那些参数可以训练的层(比如卷积层,线性层等)才会被保存到模型的state_dict中,池化层、BN层这些本身没有参数的层就不会保存在 state_dict 之中,比如针对下面模型。
class ToyModel(nn.Module):
def __init__(self):
super(ToyModel, self).__init__()
self.net1 = nn.Linear(10, 10)
self.relu = nn.ReLU()
self.net2 = nn.Linear(10, 5)
state_dict 如下:
self.module.state_dict() = {OrderedDict: 4}
'net1.weight' = {Tensor: 10} tensor([[ 0.2687, 0.0840, -0.1032, 0.3079, 0.0385, -0.0495, -0.3068, -0.1271,\n -0.1067, -0.1966],\n [-0.1203, 0.1789, 0.0666, 0.1882, 0.1335, 0.1921, -0.1145, -0.1781,\n 0.0661, -0.2339],\n [ 0.1865, -0.2076, 0.2071, 0
'net1.bias' = {Tensor: 10} tensor([ 0.2146, -0.1599, 0.2350, -0.2843, -0.0773, -0.2151, 0.1864, -0.3068,\n -0.2093, 0.1365])
'net2.weight' = {Tensor: 5} tensor([[ 0.1922, -0.0148, -0.1884, 0.2124, -0.1361, 0.0172, -0.2371, 0.1946,\n 0.2047, -0.2697],\n [-0.2690, 0.1372, 0.2269, 0.0436, -0.1353, -0.2054, -0.2418, -0.2300,\n 0.1987, 0.0007],\n [ 0.0995, -0.2659, -0.2374, -0
'net2.bias' = {Tensor: 5} tensor([0.1488, 0.0791, 0.1667, 0.1449, 0.0545])
基于阿里云弹性GPU服务的神龙AI加速引擎,无缝提升AI训练性能 云上场景的 分布式训练优化
- 在 AI 框架层,软件代码称为 Acspeed。Acspeed 使用 Pytorch 从 c10d-plugin 的接口与对应的 wrapper,实现对 Pytorch ddp 使用方式的无感支持与 bucket 层级的优化;对使用 Tensorflow 的用户,Acspeed 同样提供 horovo-api 的兼容层。
- 在集合通信算法层,Acspeed 使用集合通信编译器的技术,在 nccl runtime 的基础上,针对 nvlink/nvswitch/PCIe/NIC 交换机等互联信息进行自适应的拓扑感知与算法优化
- 针对 Pytorch 训练计算图进行了编译优化,软件代码为 Agspeed,用户侧 Pytorch eager API 使用场景不变。
留下评论