简介
AI Infra 和传统 Infra 断代了吗?从表面看起来,AI Infra 确实和传统 Infra 很不一样
- 传统 Infra 处理的是 web request,数据存储,和分布式服务协调,而 AI Infra(特别是大模型)更多围绕的是 GPU 推理,KV Cache 管理,以及大模型训练框架等全新领域。
- 请求形态也不一样:web request通常是毫秒级的request,stateless,而 LLM 推理一个 session 往往持续数秒甚至更久(随着context window 和模型大小增加),还要动态维护 token-level 的上下文状态。
- tech stack 看起来也不同:传统用的是 Kubernetes + Docker,现在大家在用 GPU, vLLM, DeepSpeed, FlashAttention, Triton, NCCL 这些仅仅从名字上听起来就很高大上的架构。 本质其实没变,仍然是系统设计和资源调度的问题。回到工程本身,其实我们仍然在面对和传统 Infra 极其类似的问题:
- 如何调度资源(从CPU/内存 变成了 GPU 显存)
- 如何处理高并发请求(从http resource request ,变成了 prompt request) 拿 vLLM 举个例子:它像是给 LLM 写了一个操作系统,用来调度“页面”(KV Cache),管理“进程”(requests), 本质上是引用了OS 的内存管理principles用来管理 kv cache。
Infra 的“三大难题”:Scaling, Sharding, and Copying所有系统的底层挑战,基本都绕不开这三个关键词:
- Scaling(扩展):系统如何支持更大的规模和更高的并发?
- 在传统 Infra 中,这意味着如何横向扩展服务器,部署更多容器,使用负载均衡 (load balancing) 来分散请求
- 在 AI Infra 中,这些问题转化为如何通过 数据并行, 模型并行,流水线并行 来分布和执行 GPU workload,以支持超大模型的训练以及 large number of inference requests
- Sharding(切片):系统如何切分状态和计算,以实现并行处理?
- 在数据库系统中,这是将数据按照主键或范围切分到不同的分区,以支持高吞吐访问
- 在 AI Infra 中,sharding 变成了对模型参数,KV Cache,activation,gradients,以及optimizer states的split,比如tensor parallelism和KV paging等,是实现分布式推理和训练的前提
- Copying(复制):系统如何高效同步数据或状态?
- 传统系统中,复制体现在数据库副本同步或者缓存预热,以及Kafka Replication
- 在 AI Infra 中,复制的代价更加显著,比如data parallelism 怎么copy model to different GPUs(所以会有ZeRO optimization 来shard 参数,gradient 等等),通常需要依赖高性能通信机制(比如 RDMA和NCCL) 这些挑战的本质没有变:仍然是如何高效并且低成本地协调跨不同机器的资源。但在 AI Infra 中,由于gpu显存limited,large context window,以及模型参数量大,它们变得更加脆弱和重要,也更需要更好的工程策略去解决这些问题。
真正有经验的 Infra 工程师,不仅仅是能搭件一个working的系统,而是有能力去从头到尾追踪每一个延迟点,把系统之间的关联和可能存在的bottleneck拆解成一系列可量化的问题,并在上线后持续做 cost/performance profiling。这正是 AI Infra (或者传统 Infra)对工程基本功要求极高的原因。
基础
模型的计算过程
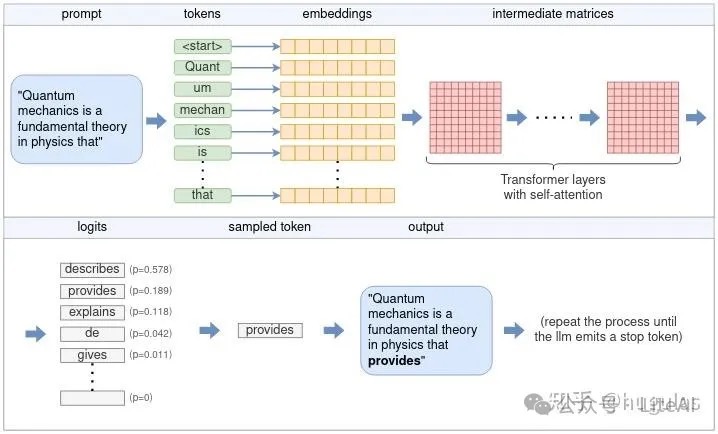
理解llama.cpp怎么完成大模型推理的LLM 通过每次迭代生成一个标记,然后将其添加到输入提示中,不断重复该过程,直到生成完整的输出。这就是 LLM 如何从输入提示生成文本的基础。
- 理解张量及其在 ggml(llama.cpp 使用的是 ggml,这是一种纯 C++ 实现的张量库) 中的应用。
- 张量的基本结构
- 张量操作
- 一系列张量操作构建了一个计算图
- 分词Tokenization(封装了词汇表/vocab)。
- 嵌入embedding/输入层。把离散的“token”,映射为一些连续的“数值”,两个token id之间是没有关系的,但两个Embedding的向量可以有距离、关联度等关系。
-
Transformer,自注意力机制是LLM架构中唯一计算词元间关系的地方,因此它构成了语言理解的核心,涵盖了对词汇关系的理解。由于涉及跨词元的计算,从工程角度来看,它也是最有趣的部分,尤其是对于较长序列来说,计算量可能会非常大。自注意力机制的输入是n_tokens x n_embd的嵌入矩阵,其中每一行或向量表示一个独立的词元。这些向量中的每一个都将被转换为三个不同的向量,分别称为“键”(key)、“查询”(query)和“值”(value)向量。这种转换通过将每个词元的嵌入向量与固定的wk、wq和wv矩阵(这些矩阵是模型参数的一部分)相乘来实现:
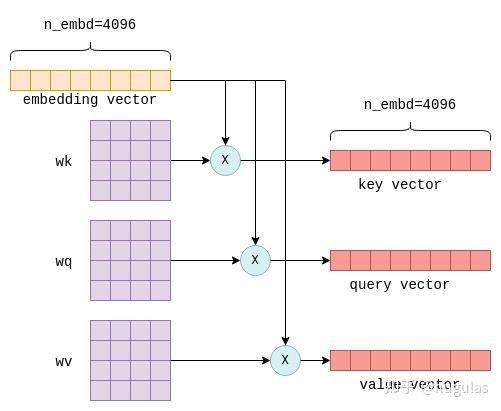 这个过程会对每个词元重复进行,也就是执行n_tokens次。理论上可以通过循环来完成,但为了提高效率,所有行会通过矩阵乘法在一次操作中进行转换。最终,我们得到三个矩阵 K、Q 和 V,它们的大小均为 n_tokens x n_embd,分别包含每个词元的键(key)、查询(query)和值(value)向量堆叠在一起。
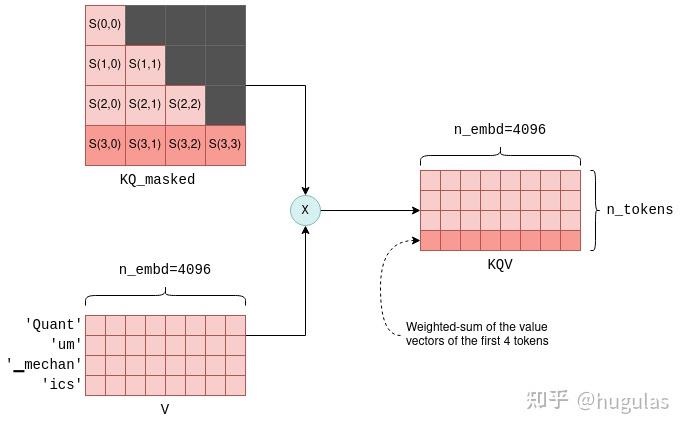
这个过程会对每个词元重复进行,也就是执行n_tokens次。理论上可以通过循环来完成,但为了提高效率,所有行会通过矩阵乘法在一次操作中进行转换。最终,我们得到三个矩阵 K、Q 和 V,它们的大小均为 n_tokens x n_embd,分别包含每个词元的键(key)、查询(query)和值(value)向量堆叠在一起。自注意力机制的下一步是将包含查询向量的矩阵 Q 与包含键向量的矩阵 K 的转置相乘。对于不太熟悉矩阵操作的人来说,此操作实际上是为每对查询和键向量计算一个联合得分。我们使用符号 S(i,j) 来表示查询 i 与键 j 的得分。这个过程生成了 n_tokens^2 个得分,每个查询-键对都有一个得分,并将其打包在一个称为 KQ 的矩阵中。随后,该矩阵会进行掩码操作,以移除对角线以上的元素:
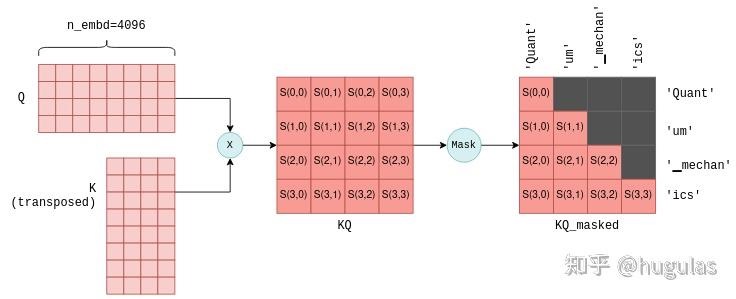 掩码操作是一个关键步骤。对于每个词元,它只保留与其前面词元之间的得分。在训练阶段,这一约束确保LLM仅根据之前的词元预测当前词元,而不是未来的词元。
掩码操作是一个关键步骤。对于每个词元,它只保留与其前面词元之间的得分。在训练阶段,这一约束确保LLM仅根据之前的词元预测当前词元,而不是未来的词元。自注意力机制的最后一步是将掩码后的得分矩阵KQ_masked与之前的值向量相乘。这样的矩阵乘法操作会生成所有前面词元值向量的加权和,其中权重是得分S(i,j)。例如,对于第四个词元“ics”,它会生成“Quant”、“um”、“▁mechan”和“ics”这几个词元的值向量的加权和,权重为S(3,0)到S(3,3),这些得分是由“ics”的查询向量与之前所有词元的键向量计算出来的。
每一层除了自注意力机制外,还包含多个其他的张量操作,主要是矩阵加法、乘法和激活函数操作,这些都是前馈神经网络的一部分。
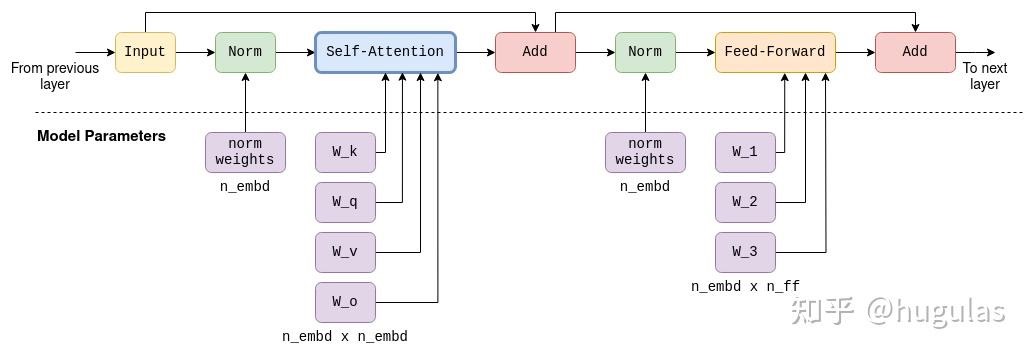
在Transformer架构中有多个层。这些层是相同的,除了每层都有自己的一组参数矩阵(例如用于自注意力机制的各自的wk、wq和wv矩阵)。第一层的输入是上文描述的嵌入矩阵。第一层的输出随后被用作第二层的输入,依此类推。我们可以将其看作每一层都生成了一组嵌入,但这些嵌入不再直接与单个词元相关,而是与词元关系的某种更复杂的理解相关联。
-
输出层/Transformer的最后一步是计算logits。logits的计算是通过将最后一个Transformer层的输出与一个固定的n_embd x n_vocab参数矩阵(在llama.cpp中也称为output)相乘来完成的。这个操作为词汇表中的每个词元生成一个logit。例如,在LLaMA中,它会生成n_vocab=32000个logits:
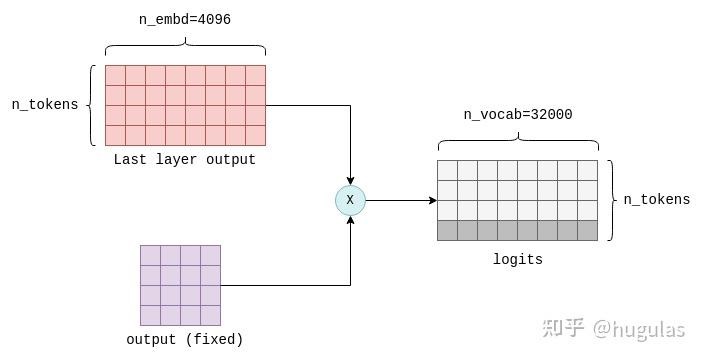 这里只关注结果的最后一行,它包含词汇表中每个可能的下一个词元的logit值。PS: 几乎所有模型最后一层都是这么一个Linear 层,它的用途是把我们中间各种layer算出来的结果,最终映射到vocab_size 维的向量里去。因为我们最终要算的,就是vocab_size 个词里,每个词出现的概率。
这里只关注结果的最后一行,它包含词汇表中每个可能的下一个词元的logit值。PS: 几乎所有模型最后一层都是这么一个Linear 层,它的用途是把我们中间各种layer算出来的结果,最终映射到vocab_size 维的向量里去。因为我们最终要算的,就是vocab_size 个词里,每个词出现的概率。 - 拿到logits列表后,下一步是根据它们选择下一个词元。这个过程称为采样。贪婪采样;温度采样;语法采样
-
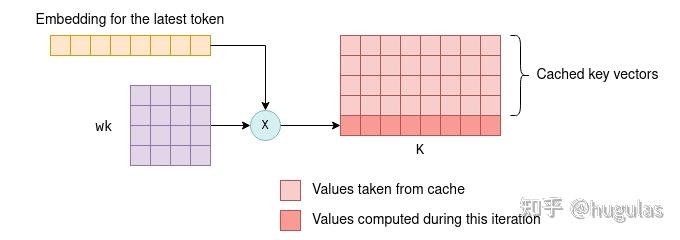
KV缓存。每个词元都有一个关联的嵌入向量,该嵌入向量通过与参数矩阵wk和wv相乘进一步转化为键(key)和值(value)向量。KV缓存是用来缓存这些键和值向量的,通过缓存它们,我们可以节省每次迭代重新计算所需的浮点运算。
 缓存的工作方式如下:
缓存的工作方式如下:- 在初始迭代期间,所有词元的键和值向量都会按照之前的描述进行计算,并保存到KV缓存中。
- 在后续迭代中,仅需要计算最新词元的键和值向量。缓存的键值向量与新词元的键值向量一起被拼接,形成K和V矩阵。这避免了重新计算所有先前词元的键值向量,从而大大提高了效率。 能够使用键和值向量的缓存,是因为这些向量在迭代之间保持不变。例如,如果我们首先处理四个词元,然后处理五个词元,而最初的四个词元没有变化,那么前四个键和值向量在第一次和第二次迭代中将保持相同。因此,在第二次迭代中不需要重新计算前四个词元的键和值向量。这一原则在Transformer的所有层中都成立,而不仅仅是在第一层。在所有层中,每个词元的键和值向量仅依赖于先前的词元。因此,当在后续迭代中添加新词元时,现有词元的键和值向量保持不变。 你可能会疑惑,既然我们缓存了键和值向量,为什么不缓存查询向量呢?答案是,实际上,除了当前词元的查询向量外,后续迭代中不再需要之前词元的查询向量。有了kv缓存后,我们实际上只需要将最新词元的查询向量传入自注意力机制即可。这个查询向量将与缓存的K矩阵相乘,计算最后一个词元与所有之前词元的联合得分。然后,它与缓存的V矩阵相乘,只计算KQV矩阵的最新一行。这个过程在所有层中重复,利用每一层的kv缓存。因此,在这种情况下,Transformer的输出是一个包含n_vocab个logit的向量,用于预测下一个词元。通过这种优化,我们节省了在KQ和KQV矩阵中计算不必要行的浮点运算,这种节省在词元列表增大时尤为显著。
格式
一些常见的大模型权重存储格式:
- PyTorch格式,pth, .pt, .bin:这是PyTorch框架的原生格式,广泛使用但安全性相对较低。
- Safetensors格式,.safetensors:由Hugging Face开发,安全性更高,加载速度更快,支持内存映射,是目前推荐的格式。
- GGUF格式,.gguf:由Georgi Gerganov定义的一种大模型文件格式,旨在快速加载和保存模型,适用于CPU推理。
- ONNX格式,.onnx:开放神经网络交换格式,旨在实现不同深度学习框架之间的互操作性。
- TensorFlow格式,.h5, .pb, .ckpt:TensorFlow使用的格式,包括HDF5格式、Protocol Buffers格式和Checkpoint文件。
- 量化格式,.gguf (llama.cpp使用), .ggml (旧版GGML), model-q4_0.bin (4-bit量化), model-q8_0.bin (8-bit量化):量化格式通过降低权重和激活值的精度来减小模型大小和内存占用,但可能略微降低精度。
- 分片格式, pytorch_model-00001-of-00003.bin:用于存储超大型模型,将权重文件分割成多个部分。
框架抽象
通用流程的抽象
前处理 → DNN推理 → 后处理,无论是分类(classification)、检测(detection)、分割(segmentation)还是姿态估计(pose estimation)等任务,这一流程都是适用的。差异主要体现在前处理和后处理的具体实现上。
引擎创建: builder → network → config → parser → serialize → save file。 network 估计指的model 计算图解析和加载
引擎推理:load file → deserialize → engine → context → enqueue。file 估计指的是图片文件
为实现代码的可复用性,我们可以采用面向对象的编程思想,将通用的流程和操作封装在基类中,不同的任务通过继承和重写基类的方法,实现各自的特定逻辑。
class InferenceEngine {
public:
virtual void buildEngine() = 0;
virtual void loadEngine(const std::string& engineFile) = 0;
virtual void preprocess(const cv::Mat& image) = 0;
virtual void infer() = 0;
virtual void postprocess() = 0;
virtual ~InferenceEngine() {}
};
请求调度
- 静态请求级调度,传入的请求在到达时被分组到批次中并一同处理。批次中的所有请求都会并行处理,新请求需要等到当前批次的所有请求完成后才能被处理。这种方法虽然简单,但会导致低效,尤其是当单个请求具有不同的输入和输出长度时。较短序列的请求会因为批次内最长运行请求的完成而受到显著延迟。
- 迭代级调度。将任务分解为更小的单位,称为“ iterations”,而非对整个请求进行调度。在自回归模型中,迭代通常被定义为生成一个单独的 token。迭代级调度能显著提升计算效率,因为请求的 token 长度通常不同。提前完成的请求可以让新的请求加入批次,而不必等到整个批次完成。这种方式减少了硬件资源的空闲时间,并提高了整体吞吐量,尤其是在请求之间的 token 数量不同的工作负载中。
- Packed Batching是高效执行已调度请求的另一个关键组件,尽管它本身并不是一种调度技术。迭代级调度通常需要在同一迭代中处理预填充阶段和解码阶段。这两个阶段在输入 token 大小方面差异显著:预填充阶段一次处理多个 token,而解码阶段每次只处理一个 token,即前一迭代的输出 token。当预填充阶段的请求和解码阶段的请求被分组到同一批次中时,这种 token 长度的不一致会导致大量填充。即使所有批次请求都处于预填充阶段,由于输入 token 长度不同,也会产生填充。这种填充会降低计算效率,因为填充的额外计算实际上是无效的。
- Continuous Batching 或 In-flight Batching,通过集成迭代级批处理和Packed Batching,我们得到了 vLLM 和 TensorRT-LLM 调度器的核心:Continuous Batching(也称为“In-flight Batching”)。这种方法旨在最大限度地减少队列等待时间并减少填充开销,从而提高硬件利用率和服务性能。
- Continuous batching 还有个别名,叫做:batching with iteration-level scheduling,这里的 iteration 就是指一次 decode 计算。也就是说在每次 decode 的迭代过程中,做 batch 的调度调整。但调度本身不是无代价的,它可能涉及到接收和处理新的输入请求,重新组织输入数据的形状,甚至各种状态的重新初始化,这些都需要消耗 CPU 时间。这也就意味着在这段时间里,GPU 是闲着的,GPU 没有得到充分利用。所以在实现时,程序并不会真的每个 iteration 都做 scheduling,目前看到有两种做法:间隔调度:比如每 16 次 decode 计算后,检查一下是否有新的输入,以及是否有空闲的槽位,然后对 batch 做一次调度调整。排队比例调度。比如当前 batch 中有 10 个请求的 decode 正在进行,而排队中有 12 个请求,超过了排队比例 1.2,那么就启动一次调度调整。
- vllm在continuous batching基础上引入了两项独特的改进:不使用混合批处理(no mixed batching)以及优先处理 prefill 请求(prefill prioritization)。PS:分成共存派(每个iteration中既有prefill又有decode)和独立派(每个iteration中只有prefill或decode)
- 不使用混合批处理,这意味着 prefill 请求只会与其他 prefill 请求一起进行批处理,而 decode 请求只会与其他 decode 请求一起处理。这种设计简化了计算路径,因为每个批次仅处理相同阶段的请求。由于没有混合批处理,调度器必须采用另一种策略:优先处理 prefill 请求。
- 为什么需要优先处理 prefill 请求:假设当前批次中的某个请求完成了,而请求池中还有新的请求等待加入批次。由于不支持混合批处理,新的请求无法直接加入当前批次,因为它需要先完成 prefill 阶段,才能进入 decode 阶段。因此,新的请求无法与当前正在处理的 decode 请求一起被批处理。这种限制破坏了连续批处理的概念。为了解决这一问题,当前批次的 decode 请求需要暂时延后处理,先处理 prefill 请求,以确保连续批处理的流程不被中断。因此,为了在后续的 decode 迭代中确保有足够的 decode 请求可以处理,必须优先调度 prefill 请求。但是会设置一个阈值防止 decode 一直等待。也就是优先确保 TTFT,然后设置一个阈值来保证 TPOT 不会太差。很明显,这只是一个折中的方法。
- 导致在decode中会被插入prefill从而导致decode卡顿以及decode阶段MFU低下这两个问题。
以下参数决定了请求如何被分组到批次中:
- 最大批次大小(max batch size)
- 最大 token 数量(max number of tokens)
- KV 缓存(KV Cache)的大小。如果没有足够的剩余 KV 缓存存储请求的上下文,该请求将无法被调度。
管理 KV 缓存大小并非确定性的——它会随着每个生成的 token 增长,最终可能扩展到最大输出 token 长度。因此,管理剩余 KV 缓存涉及一定程度的估算。与其他估算挑战类似,我们可以采用悲观或乐观的方式分配 KV 缓存。这两种策略分别称为预分配(preallocation)和按需分配(on-demand allocation)。
- 在预分配中,一旦请求被调度,其 KV 缓存的内存空间会基于输入 token 数量和最大生成 token 数量之和进行保留。这种方法确保了在解码阶段不会出现内存不足的情况,因为所需的最大 KV 缓存内存已经提前分配
- 按需分配随着 token 的生成动态分配 KV 缓存内存,而不是预先为最大值保留内存。但它引入了 KV 缓存耗尽(preemption)的风险。在这种情况下,批次中的某些请求必须被中断,其 KV 缓存需要被清除以释放内存,从而避免死锁。清除可以通过两种方式实现:将 KV 缓存交换到主存储器(host memory)或完全丢弃缓存。与交换相比,丢弃更常被优先选择,因为主存储器的读写操作会引入显著的开销。而丢弃仅需要一次预填充迭代,将先前生成的 token 与原始输入 token 连接即可,因此在大多数情况下是一种更高效的选项。
可调优能力LLM 推理服务往往用于生产环境,而生产环境面临的情况是复杂多样的。
- 对于做阅读理解的应用来说,Prompt 可能会非常长,但生成的内容可能会非常短,开发人员可能会更追求吞吐;
- 对于聊天应用来说,Prompt 可能较短,生成的内容也不会太长,开发人员可能会更追求延迟;
- 对于创作类应用来说,Prompt 可能很短,生成的内容会更长,开发人员可能会更追求首 Token 延迟。 对 Continuous Batching 实现来说,就要求它调度策略尽量清晰,并且参数可调。所以更灵活的实现,未来可能会更受欢迎。
一些已成为LLM 推理引擎中事实标准的方法 建议细读。
模型文件加载
如果使用c++ 来写推理或训练引擎的话,就没有python调用c这个复杂的事儿了。对于一个推理框架,大概可以理解为,
- 专用的推理框架入口是onnx/pnnx等模型文件,只需要graph、节点/等概念,不需要pytorch 中类似layer概念(那是为了编程上抽象复用的)。
- 先基于onnx/pnnx等模型文件,自己提一套抽象/对象比如RuntimeGraph+RuntimeGraph+Operator等(为此有一个全局的算子注册机制),将模型权重、参数加载进来 构成计算图对象/内存表示,Operator 分为有参数算子和无参数算子,weight也就是tensor会赋值给有参数 Operator.weight。
- RuntimeGraph.run 按拓扑排序执行,执行到某个节点RuntimeNode时,RuntimeNode为算子准备入参、拿到出参(也就是tensor),可能跨节点通信,Operator为 cuda 函数准备入参(cuda 函数的入参、出参也就是tensor,必须事先准备好 指针形式传给cuda函数)。概念上从大到小是Graph ==> node ==> Operator ==> cuda 函数。
- tensor/显存的申请、释放都是上层组件负责(cuda 函数内不管,cuda 函数是无状态的),会有一个DeviceAllocator(分别对应cpu和gpu)组件负责内存和显存的分配和释放、内存和显存之间的copy等接口(比如tensor.to_cuda。再复杂一点先提前申请一个大的,内部再复用一下),对DeviceAllocator封装后提供tensor对象(tensor持有DeviceAllocator 引用,初始化时调用DeviceAllocator.allocate,析构时调用DeviceAllocator.release)。只是给算子函数传入input/weight/output 指针,算子也分为cpu和gpu实现。
资源管理的抽象
对于资源的申请和释放,例如内存的分配和释放,我们也可以进行封装,使得这些操作对使用者透明。这不仅提高了代码的可复用性,也减少了内存泄漏的风险。
class MemoryManager {
public:
MemoryManager(size_t size) {
cudaMalloc(&devicePtr_, size);
}
~MemoryManager() {
cudaFree(devicePtr_);
}
void* getDevicePtr() const { return devicePtr_; }
private:
void* devicePtr_;
};
我们希望我们的代码比较好的可读性,就意味着我们在设计的时候尽量通过接口来暴露或者隐蔽一些功能。比如说,我们可以使用worker作为接口进行推理。在main中,我们只需要做到创建一个worker -> woker读取图片 -> worker做推理就好了。同时,worker也只暴露这些接口。在worker内部,我们可以让worker根据main函数传入的参数,启动多种不同的task(分类、检测、分割)。
class Worker {
public:
Worker(const std::string& taskType, const std::string& modelPath);
void loadImage(const std::string& imagePath);
void infer();
void displayResult();
private:
std::shared_ptr<InferenceEngine> engine_;
cv::Mat image_;
};
在主程序中,我们只需要与 Worker 类交互:
int main() {
Worker worker("classification", "model.engine");
worker.loadImage("image.jpg");
worker.infer();
worker.displayResult();
return 0;
}
为框架设计插件机制,允许用户自定义前处理、后处理等步骤。插件可以在运行时加载,方便功能的扩展。
class Plugin {
public:
virtual void execute() = 0;
virtual ~Plugin() {}
};
class CustomPreprocessor : public Plugin {
void execute() override {
// 自定义前处理逻辑
}
};
以kvcache为核心的分布式架构
LLM PD 分离背后的架构问题 未细读。
Mooncake 采用了以 KVCache 为中心的分离式推理架构,主要由三个核心部分组成:
- Prefill 池:这个部分负责集中管理所有的预填充阶段的计算任务。
- Decoding 池:这个部分集中处理所有解码阶段的任务。
- KVCache 池:这个部分负责存储所有中间过程中应用到的 KVCache,并决定何时使用这些缓存,何时释放它们。
prefill-decode 分离(PD 分离)架构主要是考虑到了 LLM 的 prefill 和 decode 的两个阶段的特性不同,prefill 阶段是 compute bound(对于上下文的embeding和自注意力计算,是可以并行的),decode 阶段是 memory bound(需要结合上下文以及当前token之前生成的token对应的KV值进行计算,过程是串行的),prefill 阶段的能力我们用 TTFT 首 token 时延来衡量,decode 的能力我们用 TPOT 生成每个 token 的时间来衡量。
- 但是在同一张卡上做 prefill 和 decode 会出现问题,在机器的算力等条件固定的情况下,你增加 bsz,prefill 阶段机器到算力瓶颈了,反而影响 TTFT,你减小 bsz,decode 阶段又是访存瓶颈的,decode 阶段可以比 prefill 阶段承载更大的 bsz。那么问题来了,到底要不要增大 bsz?
- 有了 PD 分离之后,我们可以把 prefill 阶段放在 H800 这样的算力高的机器,decode 阶段放在 H20 这样算力低的机器但是访存能力不会差太多的机器(毕竟显卡更新换代过程中算力增长是遥遥领先访存能力增长的),这样我们的如何 bsz 如何均衡的问题似乎可以得到解决,不同机器只负责一个阶段,bsz 也只需要根据你这个阶段的特性来设置就好了。decode 阶段可以比 prefill 阶段承载更大的 bsz。
- 但是 PD 分离有个很重要的问题,增加了通信和网络传输的成本,如果是卡间分离那么会增加通信的成本,如果是不同机器上进行分离那么就会增加网络传输 KV Cache 的成本。
DeepSeek V3采用的也是PD 分离部署方式(prefill-32张卡,decode-320张卡),由于集群分开增加的中间状态数据的传输,在NVLink这类传输技术的加持下,有开销但是可控。prefill和decode两个集群的GPU数量需要按照实际场景调整,大部分在1:2到1:4之间,具体看实际场景中TTFT和TPOT的表现和要求。
Context Caching
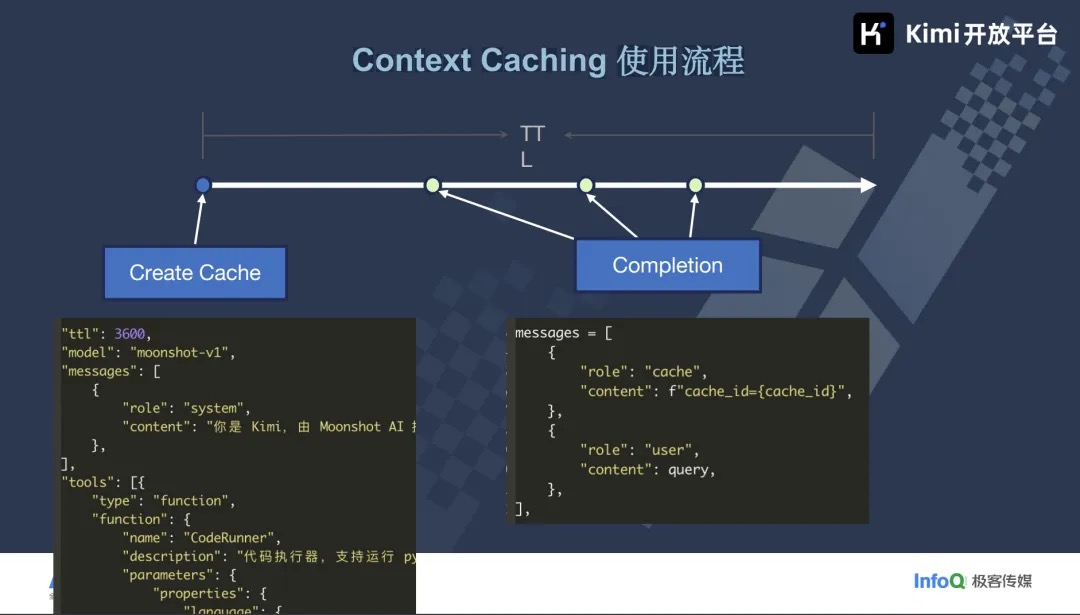
AI 推理场景的痛点和解决方案 未细读。
大模型推理框架RTP-LLM P-D分离之道:从思考到实战 未读
各种并行
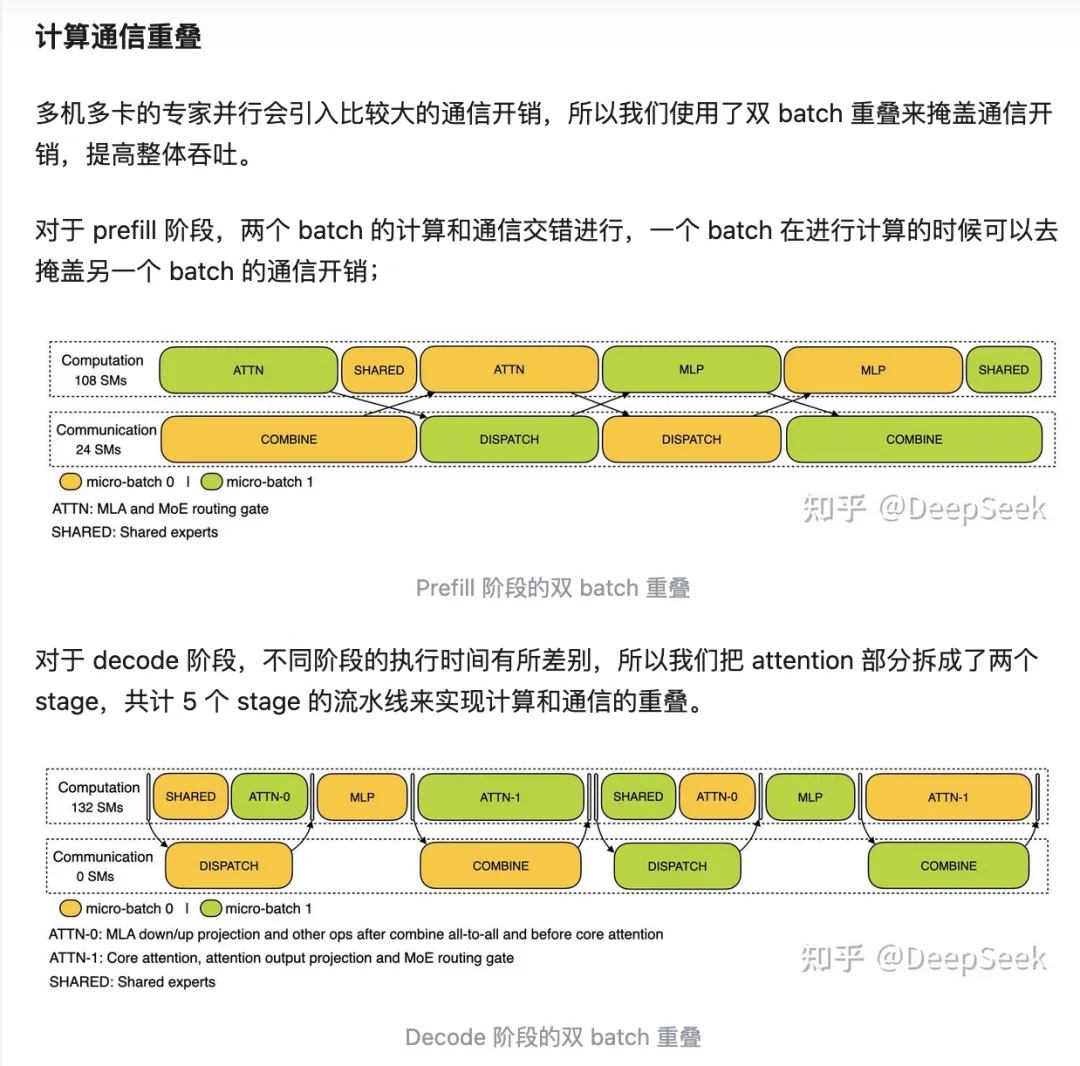
LightLLM中DeepSeek V3/R1 Two MicroBatch Overlap 实现解析 未细读(在代码上体现如何overlap)。在DeepSeek-V3/R1推理系统中,多机多卡的专家并行会引入比较大的通信开销,所以DeepSeek使用了双 batch 重叠来掩盖通信开销,提高整体吞吐。